ICARUS
Integrated Common Altitude Reference system for U–space
This project has received funding from the SESAR Joint Undertaking under the EU Horizon 2020 research and innovation program under grant agreement N°.
ICARUS – H2020 – SESAR – 2019/2 – Ref. 894593
Why a common altitude reference is needed?
The activities in which UAS are employed, from commercial to leisure, can lead them to share Very Low-Level airspace with conventional aircrafts.
To maintain separation among all users of this airspace, the altitudes of all of these aircraft must be known unmistakably through a common datum.
However, whereas conventional manned aviation uses pressure altitude obtained from barometric readings, UAS may use other systems such as GNSS-based altitudes.
While each of these different systems can enable safe separation by their own, they can each provide different altitude values from each other.
A common altitude reference system must be established to address the needs of the new airspace actors (UAS, Taxi drones, …), without superimposing additional equipment for general aviation users.
The users of ICARUS service are identified to be remote pilots and autonomous drones, considering the enhanced level of connectivity and automation provided by the U-space services at U3 level.
General aviation pilots and other airspace users (ultralights) may benefit of the altitude translation service provided by ICARUS.
The definition of the common altitude reference system is fundamental to enhance the capacity of the airspace and the separations among UASs, especially in the urban environment, where the new potential markets of package delivery and drone taxi applications are just waiting to be unlocked.
What is ICARUS
ICARUS project proposes a GNSS based altimetry solution to the challenge of the Common Altitude Reference system for drones at very low level airspace, through the identification of the navigation requirements applicable to Unmanned Aircraft Systems (UASs) and the definition of a new U-space service for UAS / Manned aircrafts altitude translation.
Common Altitude Reference for UAS
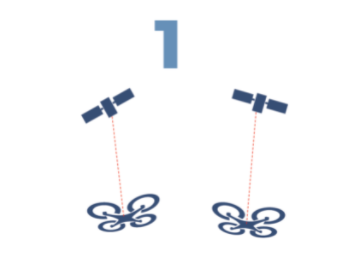
Define technical requirements for high accuracy GNSS-based altitude measurement for drones, to enable a reliable and accurate common vertical datum.
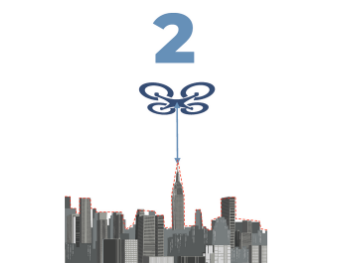
Ground Obstacle Awareness
Investigate the vertical accuracy and resolutions achievable by the actual Digital Terrain Model (DTM/DSM) services for ground obstacles clearance.
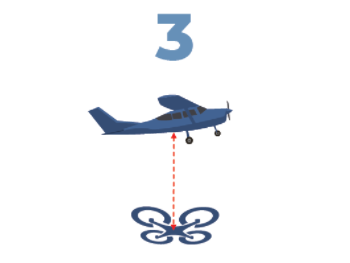
Barometric to geodetic translation
Design a tailored U-space service for height transformation: geodetic measurement to a barometric reference system and vice-versa for UAS and Manned aircrafts.
ICARUS concept will be validated in a real operational environment, providing feedbacks and refinements to the initial definition. A final Concept of Operations (CONOPS) will be generated in the second part of the project.

U-space is a set of new services relying on a high level of digitalisation and automation of functions and specific procedures designed to support safe, efficient and secure access to airspace for large numbers of drones. As such, U-space is an enabling framework designed to facilitate any kind of routine mission, in all classes of airspace and all types of environment – even the most congested – while addressing an appropriate interface with manned aviation and air traffic control.

Visit the Documents section
In the Documents section you can find all the public documents related to communication, system design and validation activities.
Technical background

The ICARUS project has strong links both with the previous SESAR Exploratory Research 2016 studies and with the actual ongoing SESAR projects such as DACUS and BUBBLES. Other initiatives as EC EGNSS studies and other international UTM initiatives will be considered during the lifetime of the project.
The Common Altitude Reference System (CARS) document developed by EuroControl and EASA represents the starting point for ICARUS investigation.
In this discussion paper EUROCONTROL and EASA have published some potential options for the resolution to the Common Altitude reference problem for drones. The conclusion of the study outlines three options covering different approaches to address the problem (GNSS/ barometric / Mixes approach). ICARUS represents the follow up of such analysis, with the enforcement of the CONOPS proposed in a relevant operational scenario.
ICARUS will consider the outcome of CORUS project in accordance with the classification of the airspace volumes provided in the final CONOPS (X, Y, Zu, Za).
In fact, the CONOPS proposed by CORUS and the related airspace architecture will represent a solid benchmark to start ICARUS study for the best possible elicitation of CONOPS and the proposed service.
At global level, ICAO has proposed a common UTM framework, in which recognizes the need for a common altitude reference system to ensure safe vertical separation between unmanned and manned traffic.
News

Final thoughts on ICARUS: what emerges from the Third Advisory Board
The Third Advisory Board workshop of the ICARUS project took place on July 26, 2022 in the Aula Magna of e-Geos and Telespazio headquarters. Over 25 international experts attended the workshop, in person or remotely. These experts represent the key...

ICARUS participates in World ATM Congress 2022 | Video
We are very pleased to be part of the 2022 edition of the World ATM Congress, which took place from the 21st to the 23rd of June 2022. World ATM Congress is the world’s largest international air traffic management (ATM) exhibition and conference...